
The Hardware
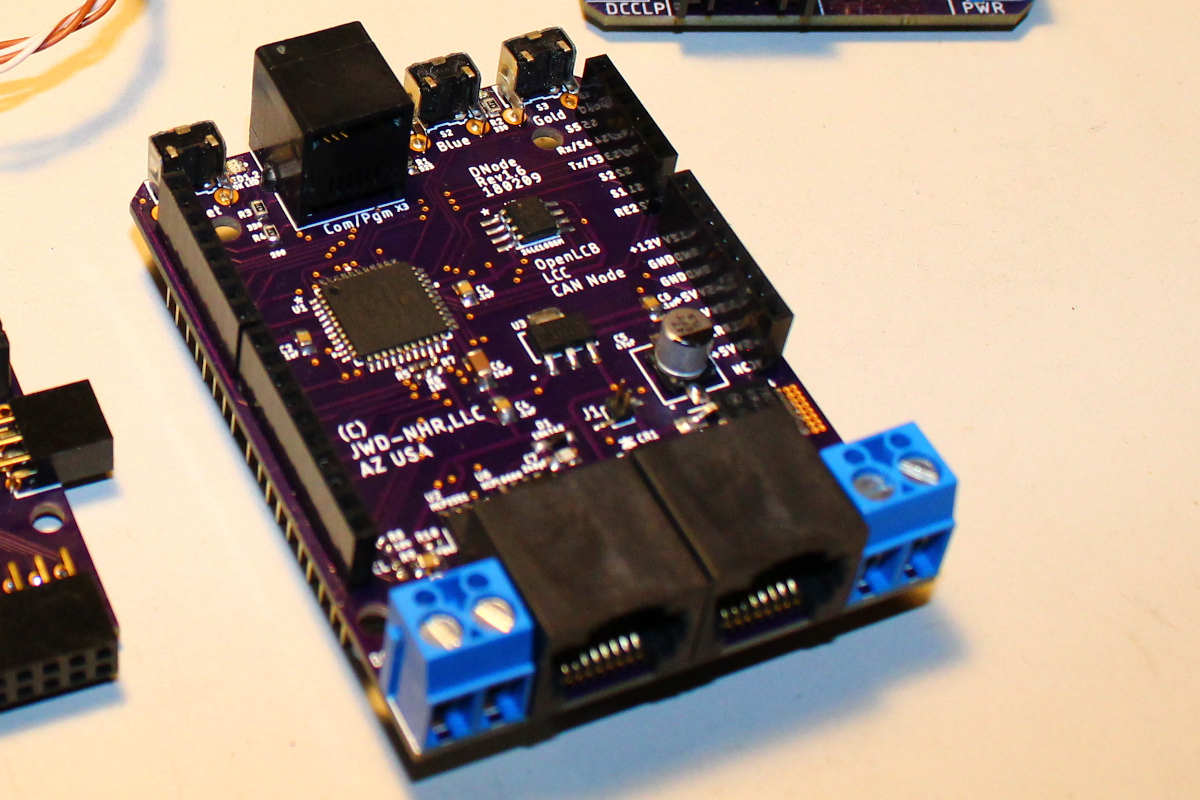
DNode
The 2.85" x 2.10" PC board is populated with:
- a Microchip PIC18F46K80 MCU with:
- 64 Kbytes Program Memory
- 1,024 Kbytes Data EEPROM
- 3.6 Kbytes RAM
- CAN bus controller
- i/o presented 35 I/O pins (12 A/D Channels and more)
- MCP2551 CAN bus driver
- CAN ports
- Serial/JMRI/Programming Port
- I2C Port – I/O expansion
- DCC Opto-Isolated signal input for DCC accessory decoding (needs software)
- 2kByte I2C EEPROM
- Blue & Gold buttons & LEDs
- DCC on CAN bus connector for boosters & Stationary decoder ability
- 3.3v regulator
- Arduino compatible "Shield" connectors
- 5 Servos, 2 can be used for extra Serial Port
- Dnode alone draws 28mA
The Printed circuit Boards were designed with AutoDesk Eagle program. I had them made by OSHPark. Download PCBoard and schematic files.
The Software
There are two parts (MPLab projects) the node program and the library, DNode_Test and LCBNodeLib. DNode_Test is a beginning point, to be built up or paired down. As the name suggests it also test that the hardware works. It's written to run 2 servos, 4 BODs, 4 BOD test outputs and 3 signals (1 dual head and 2 single head). It uses the OS/CP I/O board for the signals and BOD inputs.
Software parts that need to be worked on
DCC decoder
Grade crossing
Need to do a little updating to the signals as I just saw that JMRI added signal support for oLCB Download DNode_Test and LCBNodeLib files.
JMRI OpenLCB Connection
These are the JMRI connection settings.
System manufacturer: OpenLCB
System connection: CAN via LCC Buffer-USB
Com Port Settings: Baud 57,600
Connection Protocol: OpenLCB
These were my test results for the 'System connection' setting:
- CAN via TCH ---------------------- doubles characters (no longer supported by JMRI)
- CAN via GridConnect adapter --- OK!
- CAN via LCC Buffer-USB ------- OK!!
- CAN via GridConnect Network - IP TCP/UDP
- CAN via Lawicell CANUSB ---- NO GO, zip, no data
- CAN sim --------------------------- No port
- CAN via MERG CAN-RS ------- some bytes wrong
See Tips for the cable.